Co to jest widzenie maszynowe i jak ważne jest dla samochodów autonomicznych?
Istotne aspekty technologii autonomicznej jazdy
- Autonomiczne pojazdy wykorzystują zaawansowaną technikę widzenia komputerowego, aby rejestrować i interpretować swoje otoczenie. Dzięki temu są w stanie rozpoznawać obiekty, identyfikować znaki drogowe oraz bezpiecznie nawigować w ruchu.
- System widzenia maszynowego w tych pojazdach składa się z zestawu kamer, urządzeń obliczeniowych na krawędzi sieci i algorytmów sztucznej inteligencji. Te elementy współpracują, aby zbierać dane wizualne, przetwarzać je w czasie rzeczywistym, a następnie analizować wzorce i rozpoznawać obiekty.
- Technologia widzenia komputerowego jest fundamentalna dla osiągnięcia pełnej autonomii. Umożliwia precyzyjną klasyfikację obiektów, wykrywanie pasów ruchu, rozpoznawanie sygnałów, znaków drogowych oraz zachowań innych uczestników ruchu. Przyszłość pojazdów autonomicznych jest ściśle związana z rozwojem sztucznej inteligencji, przetwarzania danych na krawędzi i udoskonalaniem technologii kamer.
Samochody bez kierowcy od zawsze budziły szerokie zainteresowanie. Mimo że w pełni autonomiczne pojazdy nie są jeszcze standardem, dzisiejsze samochody dysponują zaawansowanymi systemami wsparcia kierowcy (ADAS). Pozwalają one na automatyczne sterowanie, zmianę pasa ruchu, wspomaganie parkowania oraz adaptacyjny tempomat.
Samochód autonomiczny wykorzystuje różnorodne czujniki w ramach systemu ADAS, przy czym kluczową rolę odgrywa system widzenia komputerowego. To on odpowiada za wykrywanie, identyfikację obiektów oraz obliczanie ich odległości. Bez tego rodzaju technologii, autonomiczne systemy takie jak tempomat i autopilot byłyby nieosiągalne.
Na czym polega widzenie komputerowe?

Widzenie komputerowe to zaawansowana technologia, która umożliwia maszynom percepcję i rozpoznawanie obiektów w otaczającym je środowisku. Jest to wyspecjalizowana dziedzina wizji komputerowej, która koncentruje się na zastosowaniach przemysłowych w maszynach autonomicznych. Obejmuje to roboty oraz pojazdy.
Współczesne systemy widzenia maszynowego opierają się na algorytmach głębokiego uczenia, w szczególności na splotowych sieciach neuronowych (CNN). Pozwalają one tworzyć bardzo precyzyjne i uniwersalne modele, które potrafią identyfikować obiekty w różnych warunkach. Dzięki temu widzenie komputerowe znajduje zastosowanie w wielu obszarach, takich jak produkcja, rolnictwo, robotyka i motoryzacja, gdzie niezawodność odgrywa kluczową rolę.
Jak funkcjonuje widzenie komputerowe w autonomicznych pojazdach?
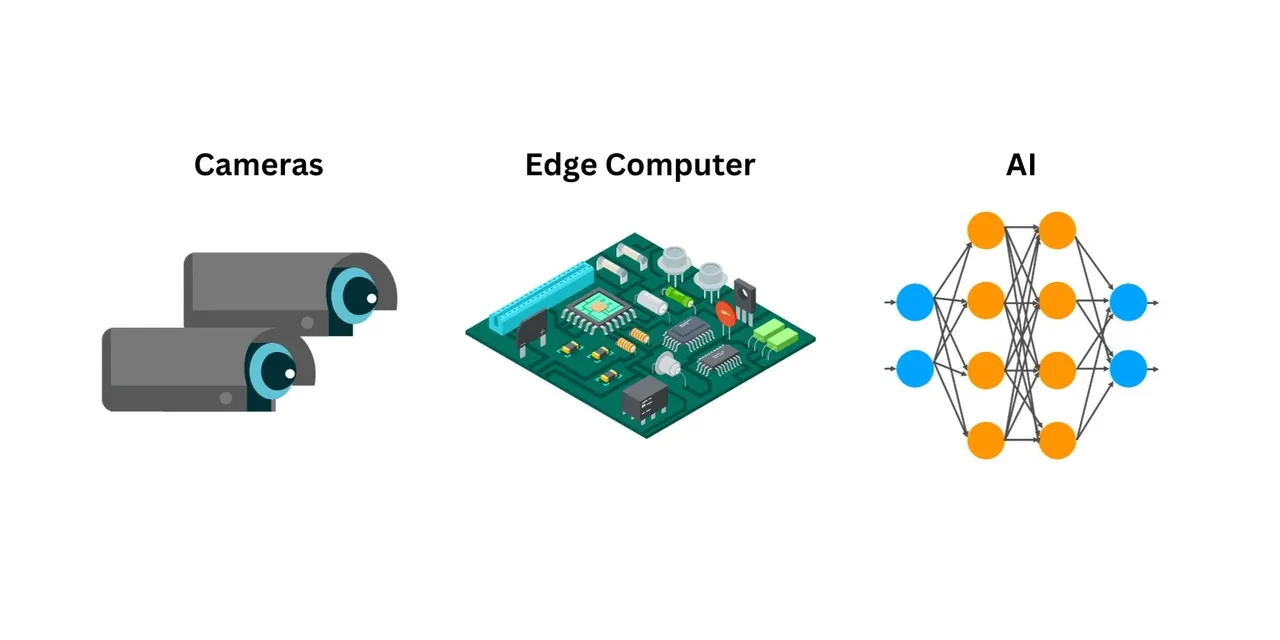
Proces widzenia maszynowego w samochodach autonomicznych można podzielić na trzy główne etapy: zbieranie danych za pomocą systemu kamer, przetwarzanie danych (obliczenia brzegowe) oraz analiza informacji za pomocą algorytmów sztucznej inteligencji. Ten układ technologii umożliwia autonomicznemu pojazdowi postrzeganie, interpretację i identyfikację obiektów oraz przeszkód podczas jazdy. Przeanalizujmy szczegółowo każdy z tych etapów, aby zrozumieć, w jaki sposób te elementy współpracują, tworząc system widzenia komputerowego autonomicznego samochodu.
System kamer
Widzenie komputerowe polega na wykorzystaniu systemów kamer do zbierania danych wizualnych z otoczenia. Autonomiczne pojazdy używają wielu kamer rozmieszczonych wokół pojazdu, aby uchwycić jak najwięcej informacji.
W kamerach systemów widzenia komputerowego stosuje się dwa podstawowe typy czujników: komplementarne półprzewodniki z tlenkiem metalu (CMOS) oraz urządzenia ze sprzężeniem ładunkowym (CCD). W kontekście autonomicznych samochodów częściej stosowana jest technologia CMOS ze względu na szybszy odczyt, efektywną elektronikę pokładową oraz zdolność do przetwarzania równoległego. Czujniki CMOS, choć szybsze, są bardziej podatne na zakłócenia i artefakty. Zastosowanie różnych trybów oświetlenia, cyfrowej noktowizji i filtrów może pomóc czujnikowi CMOS w trudnych warunkach świetlnych.
Kamery w autonomicznych pojazdach są rozmieszczone w taki sposób, aby zapewnić obraz stereoskopowy. Widzenie stereoskopowe pozwala na łączenie dwóch lub większej liczby obrazów w celu stworzenia wrażenia głębi lub trójwymiarowości otaczających obiektów i środowiska. Dzięki temu samochody mogą obliczać przybliżoną odległość między pojazdem a innymi obiektami poprzez triangulację.
Ludzie, posiadając dwoje oczu, naturalnie korzystają z widzenia stereoskopowego. Można to łatwo sprawdzić: zamknij jedno oko i spróbuj chwycić jakiś niewielki przedmiot. Ustaw dłoń obok przedmiotu, starając się, aby była w odległości kilku centymetrów. Zatrzymaj się na kilka sekund i oceń swoją pewność co do oceny odległości. Teraz otwórz oba oczy i zauważ, jak precyzyjna stała się Twoja ocena głębi.
Komputer krawędziowy
Podczas gdy system kamer autonomicznego samochodu zbiera dane, komputer pokładowy, zwany również procesorem brzegowym, przetwarza te dane w czasie rzeczywistym. Dzięki temu system może na bieżąco aktualizować informacje o otoczeniu. Chociaż przetwarzanie danych w chmurze może być bardziej opłacalne w standardowych zastosowaniach widzenia komputerowego, w przypadku samochodów autonomicznych takie rozwiązanie wiąże się ze zbyt dużym ryzykiem, nawet gdyby miało ono służyć jedynie outsourcingowi zadań związanych z widzeniem maszynowym.
Wykorzystanie komputera brzegowego do przetwarzania danych wejściowych eliminuje problemy z opóźnieniami i zapewnia, że dane są odbierane, przetwarzane i przekazywane w czasie rzeczywistym. Komputery brzegowe stosowane w samochodach autonomicznych to specjalistyczne jednostki integrujące procesory graficzne AI, takie jak rdzenie Tensor i CUDA firmy NVIDIA.
Algorytmy sztucznej inteligencji
Algorytmy od zawsze stanowią kluczowy element widzenia komputerowego. To dzięki nim komputer może identyfikować wzory, kształty i kolory zarejestrowane przez system kamer. Wykorzystanie sztucznej inteligencji, w porównaniu z tradycyjnymi algorytmami, znacznie zwiększa zdolność autonomicznego pojazdu do dokładnej identyfikacji obiektów, znaków drogowych, oznaczeń poziomych oraz sygnalizacji świetlnej. W procesie szkolenia samochodów autonomicznych wykorzystuje się wiele algorytmów AI. Najczęściej spotykane to:
- YOLO (You Only Look Once): Algorytm wykrywania obiektów w czasie rzeczywistym. Identyfikuje i śledzi obiekty znajdujące się w zasięgu widzenia samochodu.
- SIFT (Scale-Invariant Feature Transform): Algorytm służący do wyodrębniania cech. Pomaga samochodowi w rozpoznawaniu charakterystycznych punktów i obiektów w otoczeniu.
- Histogram zorientowanych gradientów (HOG): Algorytm wykorzystywany do rozpoznawania obiektów. Koncentruje się na wyodrębnianiu lokalnych wzorów i gradientów z obrazów.
- TextonBoost: Algorytm ułatwiający rozpoznawanie obiektów poprzez analizę tekstur otoczenia.
- AdaBoost: Algorytm służący do klasyfikacji danych. Łączy kilka słabszych klasyfikatorów, aby podejmować bardziej precyzyjne decyzje dotyczące obiektów i przeszkód na drodze.
Znaczenie widzenia komputerowego w autonomicznych pojazdach
 Źródło obrazu: Automobile Italia/Flickr
Źródło obrazu: Automobile Italia/Flickr
Widzenie komputerowe stanowi podstawowy mechanizm, dzięki któremu autonomiczny samochód odbiera i analizuje swoje otoczenie. Bez niego samochody autonomiczne prawdopodobnie nie wykroczyłyby poza poziom 1 na skali autonomii pojazdów i być może nigdy nie osiągnęłyby pełnej autonomii.
Dzięki systemom widzenia komputerowego autonomiczne pojazdy mogą klasyfikować obiekty, wykrywać pasy ruchu i sygnały, identyfikować znaki drogowe oraz rozpoznawać ruch pojazdów.
Wiele pojazdów autonomicznych korzysta z różnego rodzaju czujników, takich jak LIDAR, RADAR i SONAR, ale wszystkie w znacznym stopniu polegają na widzeniu komputerowym. To dzięki niemu mogą obserwować otoczenie, rozpoznawać obiekty oraz interpretować znaczenie znaków i sygnalizacji świetlnej. Pozostałe czujniki służą jedynie jako dodatkowe wsparcie dla widzenia komputerowego, zwiększając poziom bezpieczeństwa dla ludzi, zwierząt i mienia.
Warto jednak zaznaczyć, że system widzenia komputerowego może działać samodzielnie, bez wsparcia innych czujników, zapewniając funkcje autopilota. Najnowsze samochody autonomiczne Tesli zrezygnowały z RADARU, polegając wyłącznie na widzeniu komputerowym w systemie Autopilota.
Chociaż nie oznacza to, że inne technologie czujników są bezużyteczne, pokazuje, jak ważna i potężna jest technologia widzenia komputerowego w autonomicznych pojazdach.
Perspektywy rozwoju widzenia komputerowego w autonomicznych pojazdach
Widzenie komputerowe jest fundamentem autonomicznej jazdy. Dzięki niemu samochody mogą postrzegać swoje otoczenie w sposób zbliżony do ludzkiego. Mimo że wciąż istnieją wyzwania, nie można zaprzeczyć korzyściom, jakie przynosi ta technologia w dziedzinie bezpieczeństwa i nawigacji. Dalszy rozwój sztucznej inteligencji, przetwarzania danych na krawędzi sieci oraz technologii kamer z pewnością zwiększy efektywność autonomicznych pojazdów, prowadząc do osiągnięcia wyższego poziomu automatyzacji.
