

Spis treści:
- Samochody autonomiczne korzystają z technologii widzenia maszynowego, aby widzieć i rozumieć otoczenie, co pozwala im wykrywać obiekty, identyfikować znaki i poruszać się po drodze.
- Widzenie maszynowe w samochodach autonomicznych składa się z systemu kamer, obliczeń brzegowych i algorytmów sztucznej inteligencji, które współpracują w celu gromadzenia informacji wizualnych, przetwarzania ich w czasie rzeczywistym oraz identyfikowania wzorców i obiektów.
- Widzenie maszynowe ma kluczowe znaczenie dla osiągnięcia pełnej autonomii w samochodach autonomicznych, ponieważ umożliwia klasyfikację obiektów, wykrywanie pasa ruchu i sygnałów, identyfikację znaków i rozpoznawanie ruchu drogowego. Przyszłość pojazdów autonomicznych leży w postępie w sztucznej inteligencji, przetwarzaniu brzegowym i technologii kamer.
Samochody autonomiczne zawsze przyciągały uwagę. Chociaż być może nie mamy jeszcze samochodów w pełni autonomicznych, posiadamy samochody wyposażone w zaawansowane systemy wspomagania kierowcy (ADAS), które umożliwiają automatyczne kierowanie, zmianę pasa ruchu, parkowanie i tempomat uwzględniający ruch na drogach.
Samochód autonomiczny wykorzystuje wiele czujników w systemie ADAS, przy czym wizja maszynowa jest głównym sposobem wykrywania, identyfikowania i obliczania odległości obiektów i ogólnego otoczenia. Bez wizji maszynowej samochody autonomiczne z tempomatem i autopilotem są bardzo mało prawdopodobne.
Co to jest wizja maszynowa?

Widzenie maszynowe to technologia, która pozwala maszynom widzieć i rozpoznawać obiekty w otaczającym ich środowisku. Jest to podzbiór wizji komputerowej, który koncentruje się na zastosowaniach przemysłowych wizyjnego wykrywania obiektów w maszynach autonomicznych, takich jak roboty i pojazdy.
Obecnie widzenie maszynowe wykorzystuje algorytmy głębokiego uczenia się sztucznej inteligencji, takie jak splotowe sieci neuronowe (CNN), do tworzenia solidnych i dobrze uogólnionych modeli, które mogą dokładnie identyfikować obiekty w różnych warunkach. Umożliwia realizację wizji maszynowej do różnorodnych zadań wymagających większej niezawodności w produkcji, rolnictwie, robotyce i motoryzacji.
Jak działa wizja maszynowa w samochodach autonomicznych?
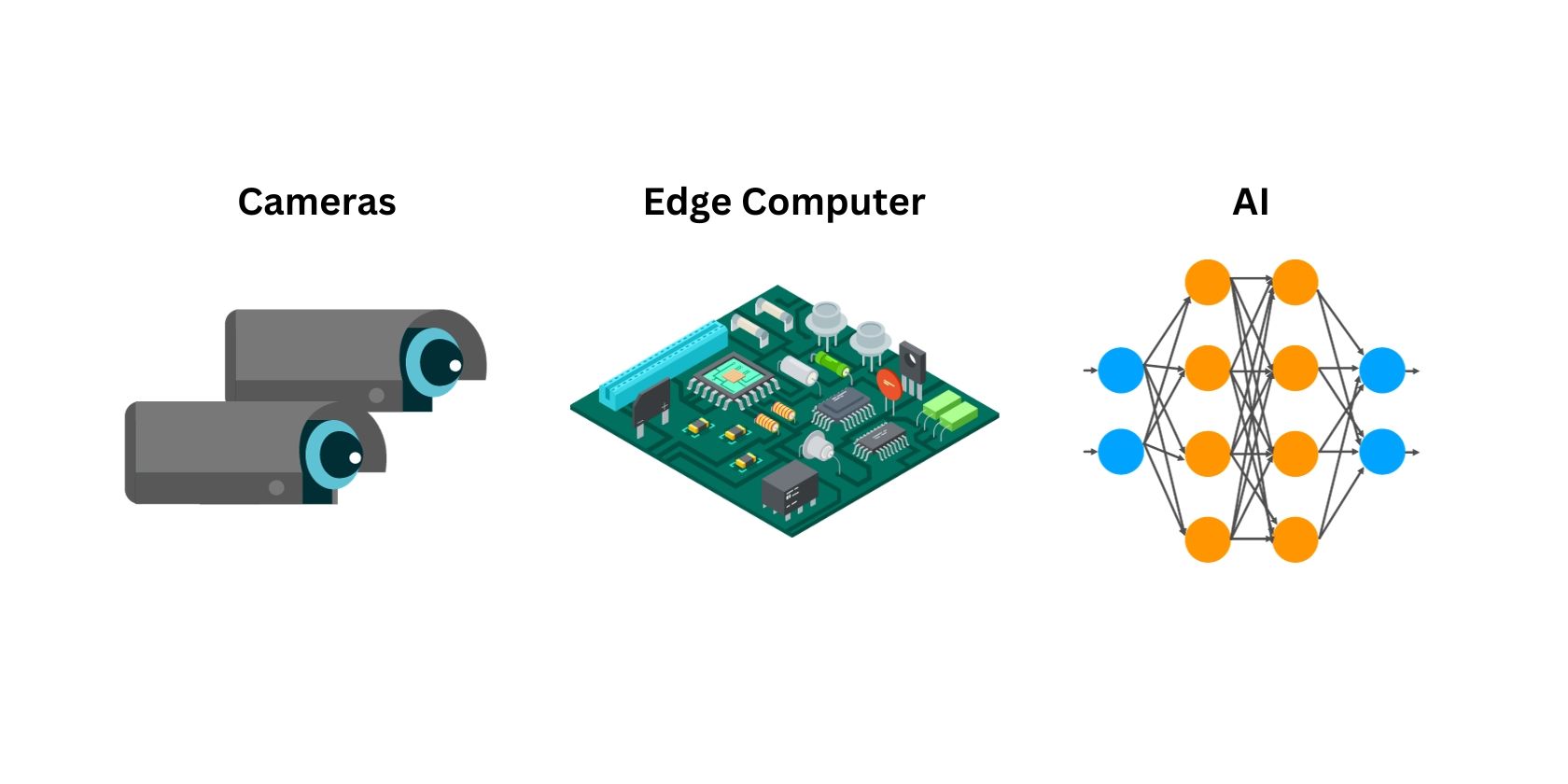
Widzenie maszynowe w samochodach autonomicznych można zazwyczaj podzielić na trzy części: system kamer, przetwarzanie (przetwarzanie brzegowe) i sztuczną inteligencję. Dzięki temu stosowi technologii autonomiczny pojazd widzi, myśli i identyfikuje znaki i przeszkody podczas jazdy. Omówmy szczegółowo każdą część, aby zrozumieć, w jaki sposób te technologie łączą się, tworząc wizję maszynową samochodu autonomicznego.
System kamer
Widzenie maszynowe opiera się na systemach kamer w celu gromadzenia informacji wizualnych o środowisku. Samochody autonomiczne wykorzystują kilka kamer zainstalowanych wokół samochodu, aby zebrać jak najwięcej informacji wizualnych.
W kamerach wizyjnych maszyn stosuje się dwa główne czujniki: komplementarne półprzewodniki z tlenkiem metalu (CMOS) i urządzenia ze sprzężeniem ładunkowym (CCD). W przypadku samochodów autonomicznych często preferuje się technologię CMOS ze względu na dużą prędkość odczytu, wydajną elektronikę pokładową i możliwości przetwarzania równoległego, co czyni go szybszym czujnikiem, aczkolwiek podatnym na szumy i artefakty. Rozwiązania takie jak różne tryby oświetlenia, cyfrowy noktowizor i filtry mogą pomóc czujnikowi CMOS w trudnych warunkach oświetleniowych.
W przypadku samochodów autonomicznych kamery są instalowane w określonych odległościach od siebie, aby zapewnić obraz stereoskopowy. Widzenie stereoskopowe to zdolność łączenia dwóch lub więcej bodźców wizualnych, tworząc wrażenie głębi lub trójwymiarowości obiektów i otoczenia. To z kolei pozwala samochodom na triangulację i obliczenie przybliżonej odległości między obiektem a samochodem.
Ponieważ ludzie mają dwoje oczu, korzystamy również z widzenia stereoskopowego. Możesz to przetestować samodzielnie; zamknij jedno oko i wybierz mały przedmiot z biurka. Połóż dłoń na boku przedmiotu i upewnij się, że jego koniec znajduje się w odległości co najmniej dwóch cali. Spróbuj zrobić pauzę na kilka sekund i zobacz, jak pewny jesteś swojego przybliżenia. Teraz spróbuj otworzyć oba oczy i zobacz, jak znacznie poprawiło się Twoje poczucie głębi.
Komputer krawędziowy
Podczas gdy system kamer w samochodzie autonomicznym zbiera dane, komputer pokładowy (procesor brzegowy) przetwarza wszystkie dane wejściowe w czasie rzeczywistym, aby natychmiast zaktualizować system o stanie środowiska. Chociaż typowe zadania związane z widzeniem maszynowym mogą zaoszczędzić pieniądze dzięki przetwarzaniu w chmurze, istnieje po prostu zbyt duże ryzyko, że samochody autonomiczne będą podłączone do chmury, nawet jeśli ma to na celu outsourcing procesu w zakresie wymagań dotyczących widzenia maszynowego.
Używanie komputera brzegowego do przetwarzania danych wejściowych eliminuje problemy z opóźnieniami i gwarantuje, że dane są odbierane, przetwarzane i przesyłane w czasie rzeczywistym. Komputery brzegowe do samochodów autonomicznych wykorzystują wyspecjalizowane komputery integrujące procesory graficzne AI, takie jak rdzenie Tensor i CUDA firmy NVIDIA.
Algorytmy sztucznej inteligencji
Algorytmy zawsze były kluczową częścią widzenia maszynowego. Algorytm pozwala komputerowi zidentyfikować wszystkie wzory, kształty i kolory dostarczane przez system kamer. Wykorzystanie sztucznej inteligencji w porównaniu z bardziej tradycyjnymi algorytmami widzenia maszynowego znacznie zwiększa zdolność samochodu autonomicznego do niezawodnej identyfikacji obiektów, znaków drogowych, oznaczeń drogowych i sygnalizacji świetlnej. Do szkolenia samochodów autonomicznych wykorzystuje się wiele algorytmów sztucznej inteligencji. Do najpopularniejszych należą:
- YOLO (You Only Look Once): Algorytm wykrywania obiektów w czasie rzeczywistym, który identyfikuje i śledzi obiekty w polu widzenia samochodu.
- SIFT (Scale-Icar’sant Feature Transform): Używany do ekstrakcji cech, pomaga samochodowi rozpoznać charakterystyczne punkty orientacyjne i obiekty w swoim otoczeniu.
- Histogram zorientowanych gradientów (HOG): używany do rozpoznawania obiektów, skupia się na wyodrębnianiu lokalnych wzorów i gradientów z obrazów.
- TextonBoost: Algorytm pomagający w rozpoznawaniu obiektów poprzez analizę tekstur w środowisku.
- AdaBoost: Stosowany do klasyfikacji danych, AdaBoost łączy wiele słabych klasyfikatorów, aby podejmować trafne decyzje dotyczące obiektów i przeszkód na drodze pojazdu.
Znaczenie widzenia maszynowego w samochodach autonomicznych
 Źródło obrazu: Automobile Italia/Flickr
Źródło obrazu: Automobile Italia/Flickr
Widzenie maszynowe to dla autonomicznego samochodu podstawowy sposób wyczuwania i rozumienia otoczenia. Bez widzenia maszynowego bardzo prawdopodobne jest, że samochody autonomiczne zostaną zepchnięte z powrotem na poziom 1 na skali autonomii pojazdów i mogą nigdy nie osiągnąć pełnej autonomii.
Dzięki systemowi widzenia maszynowego samochody autonomiczne są obecnie w stanie klasyfikować obiekty, wykrywać pas ruchu i sygnały, identyfikować znaki i rozpoznawać ruch drogowy.
Chociaż wiele pojazdów autonomicznych korzysta obecnie z różnych czujników, takich jak LIDAR, RADAR i SONAR, wszystkie w dużym stopniu opierają się na widzeniu maszynowym, aby widzieć otoczenie, identyfikować obiekty i rozumieć znaczenie znaków i sygnalizacji świetlnej na drodze. Wszystkie te dodatkowe czujniki służą jedynie wzmocnieniu widzenia maszynowego i zwiększeniu bezpieczeństwa ludzi, zwierząt i mienia.
To powiedziawszy, widzenie maszynowe może działać niezależnie, bez pomocy innych czujników, które zapewniają możliwości autopilota. W rzeczywistości w najnowszych samochodach autonomicznych Tesli zrezygnowano z RADARU i obecnie w systemie Autopilota opierają się wyłącznie na obrazie maszynowym.
Chociaż nie oznacza to niczego, jeśli chodzi o dyskredytację przydatności innych technologii czujników, pokazuje znaczenie i siłę widzenia maszynowego w samochodach autonomicznych.
Przyszłość widzenia maszynowego w pojazdach autonomicznych
Widzenie maszynowe jest podstawą samochodów autonomicznych. Dzięki widzeniu maszynowemu samochody mogą widzieć i postrzegać otoczenie dokładnie tak samo, jak ludzie. Chociaż wyzwania nadal istnieją, nie można niedocenić korzyści, jakie wizja maszynowa zapewnia w zakresie bezpieczeństwa i nawigacji. Jeśli chodzi o przyszłość pojazdów autonomicznych, wszelkie dalsze postępy w sztucznej inteligencji, przetwarzaniu brzegowym i/lub technologii kamer z pewnością sprawią, że samochody autonomiczne staną się bardziej wydajne, co prawdopodobnie przeniesie je na wyższy poziom automatyzacji.